

Specialized Underwater Systems
 Phoenix’s engineering department is comprised of multi-disciplined engineers and technicians focused on designing and manufacturing innovative products to solve challenges facing the commercial, government, defense, and scientific industries. We proudly offer:
Phoenix’s engineering department is comprised of multi-disciplined engineers and technicians focused on designing and manufacturing innovative products to solve challenges facing the commercial, government, defense, and scientific industries. We proudly offer:
By utilizing Phoenix’s phased engineering approach, we ensure success by:
- Rapid concept development
- Designing for simplicity and reliability
- Early operational prototype development and field testing
- Fleet / Operations integration and evaluation
U.S. Navy’s Saturation Fly-Away Dive System (SATFADS)
 SATFADS is a portable 1,000 ft saturation diving system for use on suitable vessels of opportunity. It consists of deck decompression chambers (a 6-person living chamber and a transfer chamber), a 3-person diving bell, hyperbaric life-support equipment, a system control center, and a man-rated handling system.
SATFADS is a portable 1,000 ft saturation diving system for use on suitable vessels of opportunity. It consists of deck decompression chambers (a 6-person living chamber and a transfer chamber), a 3-person diving bell, hyperbaric life-support equipment, a system control center, and a man-rated handling system.
Pressure Tolerant Electronics (PTEs)
Over the years Phoenix has studied the effects of pressure on hundreds of electronic components and built a database that we draw upon for new pressure-tolerant projects.
We have conducted many successful deep-water missions with PTE vehicles, like our xBot® micro-ROV, exploring inside the Titanic and documenting the bridge of the oil rig Deepwater Horizon.
Sea Water Inflatable Launch and Recovery System (SWI-LARS)
SWI-LARS is a lightweight, fabric unmanned underwater vehicle (UUV) launch and recovery system designed, manufactured, assembled, and tested by Phoenix. It fits inside a Tomahawk capsule and is designed for use in a Virginia-class submarine torpedo tube. It uses a unique inflatable piston design that provides a large packing ratio.
Underwater 3-D Damage Assessment Tool (3DAT)
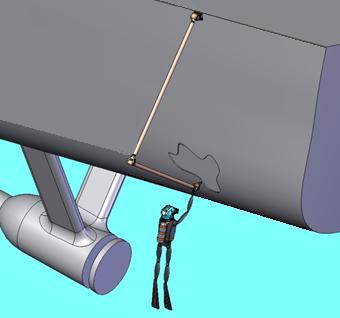 3DAT is a diver-operated underwater assessment tool that creates a fast, accurate, and detailed CAD model of collision or accident damage to U.S. Navy vessels in real time. The 3DAT is a portable, diver-operated, articulated arm with either a laser scanner or contact probe providing the capabilities of an underwater CMM.
3DAT is a diver-operated underwater assessment tool that creates a fast, accurate, and detailed CAD model of collision or accident damage to U.S. Navy vessels in real time. The 3DAT is a portable, diver-operated, articulated arm with either a laser scanner or contact probe providing the capabilities of an underwater CMM.
ROV and AUV Gamma Radiation Detector Integration and Testing
 Phoenix designed, fabricated, and tested separate ROV and AUV payloads capable of detecting radiological emissions from sources laying on or immediately below the seafloor in water depths to 20,000 feet of seawater (fsw). Central to both tasks were customer-specified Gamma Radiation Detectors (GRDs).
Phoenix designed, fabricated, and tested separate ROV and AUV payloads capable of detecting radiological emissions from sources laying on or immediately below the seafloor in water depths to 20,000 feet of seawater (fsw). Central to both tasks were customer-specified Gamma Radiation Detectors (GRDs).
Hydros II Remotely Operated Vehicle (ROV) Design and Build
Phoenix developed an air transportable, hydraulically powered, small footprint, high thrust-to-weight, light work ROV system (vehicle, launch and recovery unit, and control suite) to meet unique U.S. Navy technical criteria while providing commonality across its ROV fleet. Design criteria for the ROV system included Vessel of Opportunity (VOO) operability; ability to power/use work tools; through-frame lift capability; automated vehicle controls; operation in 5,000 fsw, and reduced maintenance and repair costs.
Case Studies
USS Monitor Turret Recovery Spider
 The USS Monitor Turret Recovery Spider is a 25-ton, eight-legged claw designed for lifting the turret from the seafloor in 240 ft of water, where it rested for 140 years. The eight claws are individually hydraulically operated and designed to grasp around and under the turret.
The USS Monitor Turret Recovery Spider is a 25-ton, eight-legged claw designed for lifting the turret from the seafloor in 240 ft of water, where it rested for 140 years. The eight claws are individually hydraulically operated and designed to grasp around and under the turret.
Harris Buoy
Phoenix initially reviewed and recommended changes to subsea equipment designs and deployment plans to increase system reliability and the installation of a weather window for a data buoy system off Sardinia, Italy for Harris. By the end of the project, Phoenix’s efforts included hardware redesign, recovery of the failed system, replacement of this system with a temporary one, implementation of design changes, system testing, development of detailed installation plans & procedures, logistics support, and installation of a new system off Cyprus.